�ėp�h���C�o�[�{�[�h
���̂����̂RCh���g����3��BLDC���[�^���쓮���܂����B����̓}�C�R���iMC56F8013�j�ōs���A
�����̂UChPWM���W���[����3���g�`�����Ă��܂��B
�ȉ��A�T�v���Љ�܂��B
1.�\��
�Q�D�T�v
�}�C�R������ɂ��ėp�h���C�o�[�{�[�h�����F16�r�b�gDSC MC56F8013�A
DEMO�h���C�o�[��F�p���[MosTr-H�u���b�W�o��4Ch�ő�d��40V�A�ő�d��20A
�d���d���F(Vm )24V�A�iVcc�j12V�iLogic���ʁj
�쓮���@�F3��120���ʓd�@PWM�ɂ�鑬�x����
�v���O�����J���c�[���F�t���[�X�P�[����CW�������v���O����
����A�e�ʁFC����A4104�o�C�g
�v���O�����̃_�E�����[�h�A�f�o�b�O�F�p�������|�[�gto JTAG
�R�D�������
�E��̍����l�p�i�����[�j�Ɠd���Z���X��R�͎g�p���Ă��܂���B
�S�D3��BLDC���[�^�̑��x����
���x����̃C���^�[�t�F�C�X�Ƃ��ẮA�����{�^���X�C�b�`�iIrq2�j���������Ƃɑ��x���T���ÂA�b�v�����A
�ő呬�x�i��]���j�ɂȂ�����T���Â_�E�������܂��B
���x���䏈���́A�z�[���Z���T����̐M��(Hu,v,w)�Ԋu���}�C�R�������^�C�}�[�ŃJ�E���g����
�v�Z�������[�^�̎��ۑ��x�ƁA�����{�^���X�C�b�`���͂���̗v�����x���Ƃ���PI�R���g���[��(�\�t�g�E�G�A���C�u����)��
���͂��Ă��̍������v�Z���A��������PWM���W���[����PWM�ϊ��i���d�����w�����x�j����
���[�^�̃X�e�[�^�����e���iPhaseA,B,C�j�Ɉ�����܂��B
���[�^�̉�]���x�̓X�e�[�^�����̓d���ɔ�Ⴕ�܂��B
�܂�v�����x�Ǝ��ۑ��x����v����悤�ɓd���t�B�[�h�o�b�N���[�v���\�����Ă��܂��B
����A���[�^����]�����邽�߂ɂ́A���[�^�̌��݈ʒu�ɑΉ����ēK�ȋ쓮�g�`�i�}��120�����ꂽ3���d���j��
�X�e�[�^�����e���ɗ^����K�v������܂��B���[�^�̌��݈ʒu�͊e�z�[���Z���T�̊��荞�ݐM���ɂ���Ĕ��ʂ��A
�X�e�[�^�ւ̋쓮�p�^�[�������炩���ߗp�ӂ����z��ǂݏo���Ĉ�����Ă��܂��B
�N�����ɂ͉�]���������߂邽�߂̃V�[�P���X���v���O�����Ő������A
��]�̉�]�����ɂȂ�悤�ɐ��䂵�Ă��܂��B
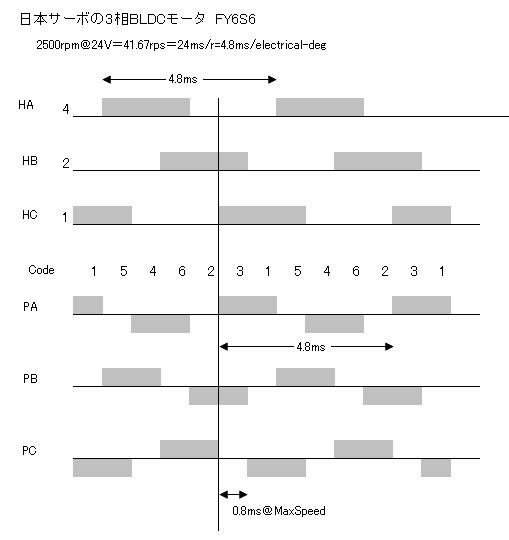
�z�[���Z���T�[�o�͂ƃX�e�[�^�e���̔g�`

���{�T�[�{(��)��3��BLDC���[�^�@FY6S6
�T�D���̑�
���ۂ̃��[�^�쓮�ɍۂ��Ă͉ߓd���A�ߓd���A�߉��x�A�Ȃǂ̑K�v�ƂȂ�܂���
����̉�H�A�v���O�����ł͂��̂悤�ȑ�͂��Ă���܂���B
�ȏ�̎����Ɋ�Â��ėp�h���C�o�[�{�[�h�Ƃ��ăv�����g��������̂����̎ʐ^�ł��B
���ケ�̊�𗘗p����PC����̐���A�p���X���[�^�A�A�N�`���G�[�^�A�Ȃǂ̋쓮���l���Ă��܂��B

�ȏ�
�L�ڂ���Ă���Ж��A���i���A����у��S�}�[�N�́A��ʂɊe�Ђ̏��W�܂��́A�o�^���W�ł��B
�f�ڂ����I���W�i���̕��́E�\�t�g�E�F�A�E��H�E�}�A�摜���̒��쌠��ۗL���܂��B
�܂��A��������g�p�������ʂɂ��ĕۏ�����̂ł͂���܂���B